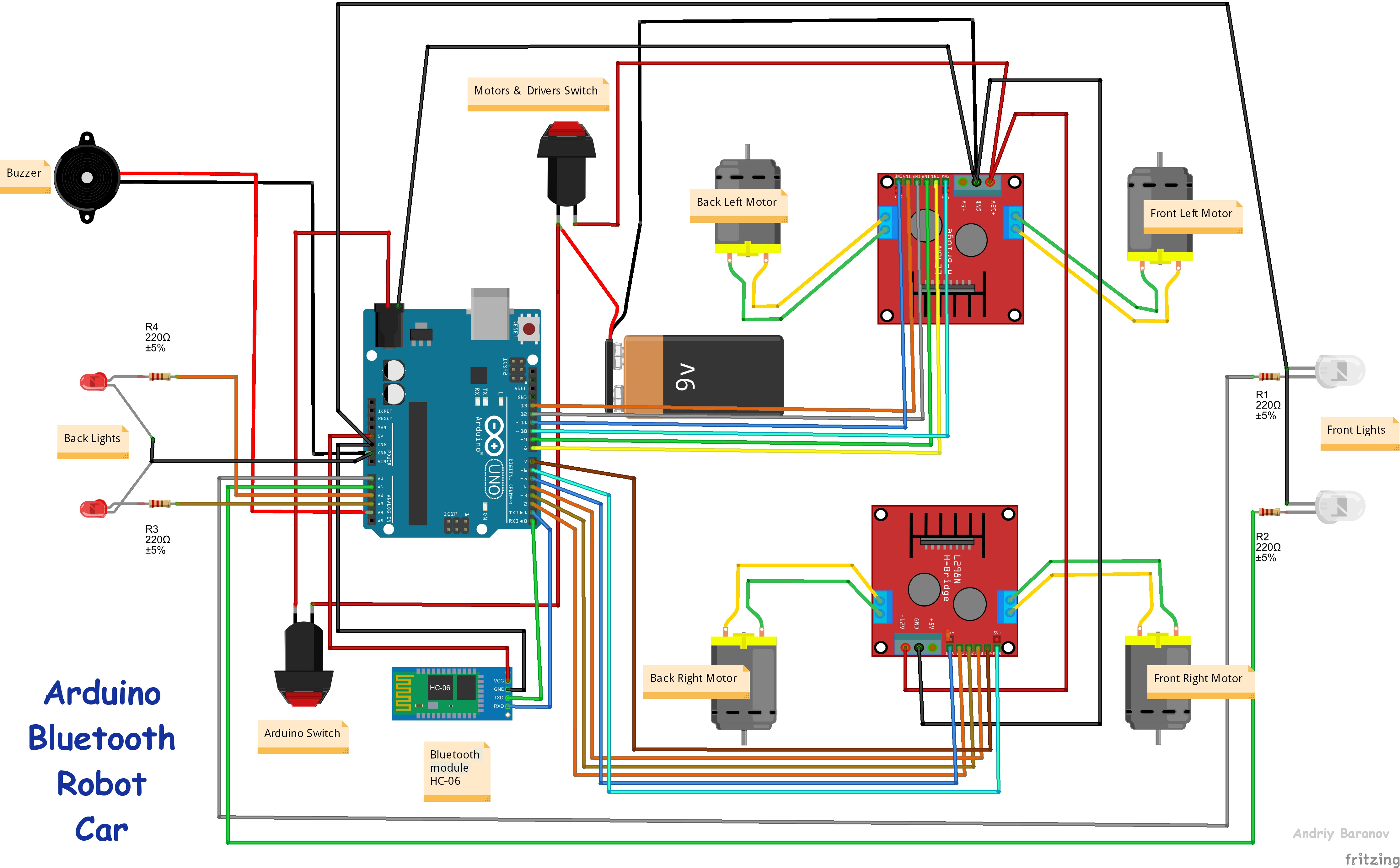
Аппаратная часть машинки использует родительский модуль ARDUINO UNO основанный на микроконтроллере ATMEGA168 и драйвера двигателей L298N
Данная машинка построена по принципу привода "танка" , то есть поворот осуществляется замедлением и реверсом двигателей одной стороны. Это даёт возможность развернуть платформу что называется «на месте», хотя и ограничивает скорость самой платформы
